A Modular AI Architecture for Multi-Modal Infrastructure Inspection: From Data Acquisition to Decision Support
Introduction
Infrastructure networks are foundational to economic and social activity, yet much of the global stock is aging, operating beyond its original design life, and exposed to intensifying environmental hazards. Manual, visual Infrastructure Inspection-often performed with lane closures, scaffolding, or rope access-is costly, disruptive, and susceptible to inconsistency across inspectors. For linear assets like power transmission lines and pipelines, inspection coverage and data quality are particularly hard to control.
At the same time, several trends are converging in AI in Infrastructure:
Sensing proliferation:
RGB and IR cameras, LiDAR, GPR, acoustic emission sensors, fiber Bragg grating (FBG) sensors, and IMUs mounted on UAVs for aerial inspection/AI Drone Inspection, ground vehicles for rover inspection, and fixed sensor networks.
AI maturity:
Convolutional neural networks, vision transformers, and temporal models now achieve state-of-the-art performance on crack detection, spalling segmentation, corrosion detection, and defect quantification, enabling production-grade AI Inspection pipelines.
Digital twins and SHM:
Virtual replicas integrating sensor data and physics-based models support continuous monitoring and predictive maintenance.
However, most existing deployments are vertical point solutions-one-off pipelines optimized for a specific asset (e.g., concrete bridge decks) and modality (e.g., RGB images), tightly coupled to particular datasets and hardware. This hinders reuse, scalability across asset classes, and standardized evaluation, limiting the impact of AI Infrastructure Inspection initiatives.
This paper argues for a modular, multi-modal AI architecture that cleanly separates acquisition, perception, structural modeling, and decision support. We emphasize:
- -Abstractions that generalize across assets and sensing platforms (UAV, rover, fixed sensors).
- -Multi-modal fusion to combine complementary views (surface vs. sub-surface, geometry vs. texture, static vs. dynamic response).
- -Human-in-the-loop design so inspectors and engineers remain central decision-makers.
- -Integration into existing asset management and work-order systems, not just model metrics.
We structure the paper as follows: Section 2 sets out infrastructure and data foundations. Section 3 defines core tasks and requirements. Section 4 presents the modular architecture. Sections 5–8 detail each layer (acquisition, data management, perception, SHM/digital twins). Section 9 covers decision support and workflow integration. Sections 10–18 discuss robustness, evaluation, deployment patterns, case-study templates, and open problems in AI in Infrastructure.

Infrastructure and Data Foundations
Civil infrastructure encompasses bridges, pavements, tunnels, dams, railways, power lines, substations, offshore platforms, and industrial plants. Each asset type has characteristic defect typologies (e.g., cracking, spalling, delamination, corrosion, fatigue fractures, misalignment) and inspection standards (e.g., bridge condition ratings, power line clearance norms).
Asset Classes, Defects, and Inspection Standards
Transportation structures:
Bridges, viaducts, culverts-focus on cracking, spalling, rebar exposure, bearing degradation, joint distress, scour.
Linear assets:
Power lines and pipelines-component detection (towers, insulators, conductors), vegetation encroachment, corrosion, hotspots, and mechanical damage, often via UAV-based aerial inspection and mobile rover inspection along corridors.
Buildings and plants:
Facades, tanks, pressure vessels-cladding failures, corrosion, leak detection, thermal anomalies.
Standards define condition indices, inspection intervals, sampling strategies, and reporting requirements. A modular AI Infrastructure Inspection system must map raw predictions (e.g., pixel-wise defects from AI Inspection models) into these standardized condition ratings and reporting formats.
Sensing Modalities and Platforms
Common sensing modalities include:
Visual imaging (RGB):
High-resolution cameras for surface defects (cracks, spalling, corrosion, efflorescence).
Infrared / Thermography:
Hotspots in power lines, moisture intrusion, delamination in bridge decks.
LiDAR and depth sensors:
Geometry, clearances, deformation, and 3D reconstruction for digital twins.
GPR and Ultrasonics:
Sub-surface defects (voids, delamination, rebar corrosion).
Vibration/strain sensors:
Response under ambient or controlled loading for modal analysis and damage detection.
Platforms include UAVs for AI Drone Inspection and general aerial inspection, UGVs for rover inspection, climbing robots, inspection vehicles, and fixed sensor networks. The architecture must support heterogeneous combinations of modality + platform across Infrastructure Inspection projects.

Core Inspection and SHM Problem Settings
We categorize AI Infrastructure Inspection tasks as:
Component detection:
Locating towers, insulators, bolts, joints, bearings.
Defect detection & segmentation:
Cracks, spalling, corrosion, delamination, vegetation infringement, missing components.
Condition rating & anomaly detection:
Asset-level health indices, unusual patterns in multimodal data.
3D reconstruction & deformation monitoring:
Multi-view image-based reconstruction and LiDAR fusion for geometry and deflection tracking.
Prognostics:
Remaining useful life, deterioration forecasting, risk of failure.
Each task has different spatial and temporal scales-from pixel-level segmentation to asset-level health indices-necessitating modular models and flexible data representations that can be reused across AI in Infrastructure applications.
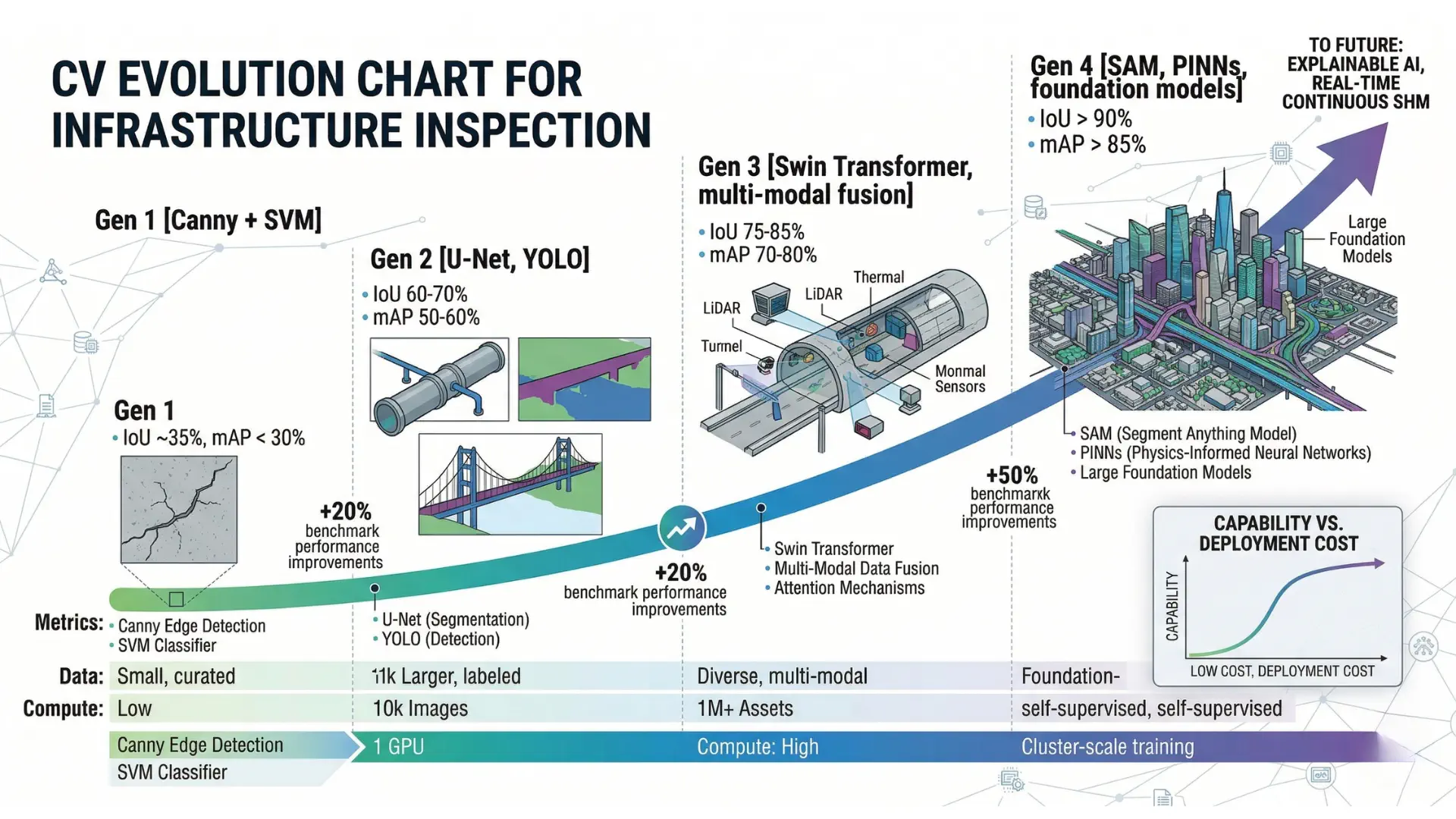
Evolution of AI for Infrastructure Inspection
Early computer vision systems relied on handcrafted features (edge detectors, texture descriptors, Hough transforms) and simple classifiers. These approaches were sensitive to illumination, viewpoint, and noise.
Deep learning-based methods-especially CNNs and encoder–decoder architectures-dramatically improved robustness and accuracy for crack detection, spalling segmentation, and surface defect classification. More recently:
- -One-stage detectors (YOLO variants, RetinaNet) and two-stage detectors (Faster R-CNN) for components and defects in UAV imagery supporting AI Drone Inspection.
- -Vision transformers and hybrid CNN–Transformer models for long-range context and 3D/temporal reasoning.
- -Multi-modal fusion of RGB, IR, and other signals for more reliable detection, especially in challenging conditions.
However, most systems are monolithic, dataset-specific, and difficult to port across assets or to different aerial inspection and rover inspection platforms. This motivates a modular architecture that decouples components and emphasizes interoperability within AI in Infrastructure ecosystems.
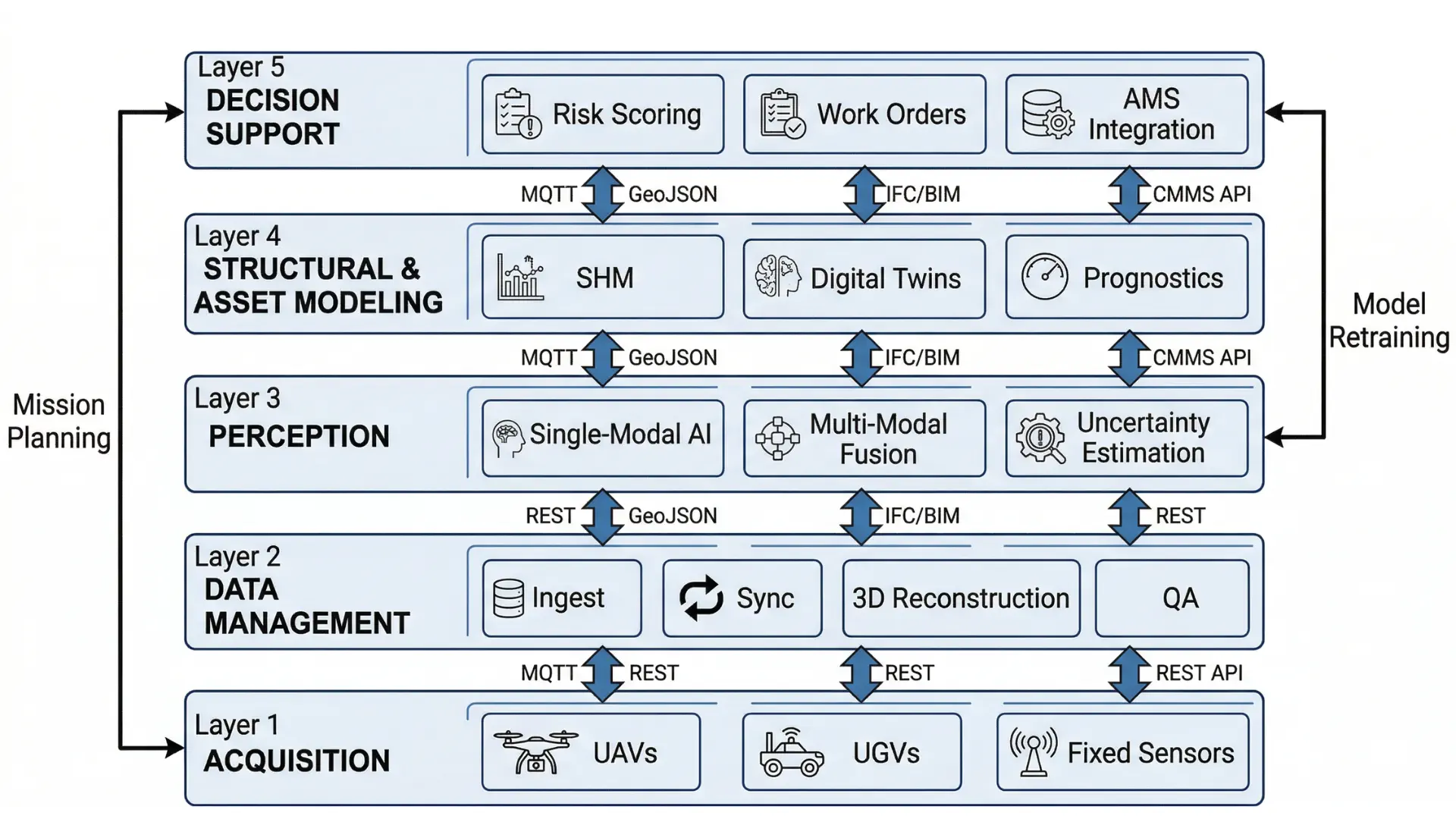
Modular Architecture Overview
We propose a five-layer modular architecture (conceptual Figure):
Acquisition Layer:
Sensing platforms, mission planning, on-board pre-processing for UAV and rover missions.
Data Management Layer:
Ingest, synchronization, storage, 3D reconstruction, quality control.
Perception Layer:
Single- and multi-modal defect/component models, fusion modules powering AI Inspection services.
Structural & Asset Modeling Layer:
SHM models, digital twins, degradation forecasting.
Decision Support Layer:
Risk scoring, prioritization, work orders, dashboards, integration with asset management systems.
Each layer exposes standardized interfaces (APIs, schemas) to promote reuse: e.g., perception outputs standardized as geo-referenced defect instances with uncertainty, which the decision layer can consume regardless of the underlying architecture or whether data came from aerial inspection or rover inspection.
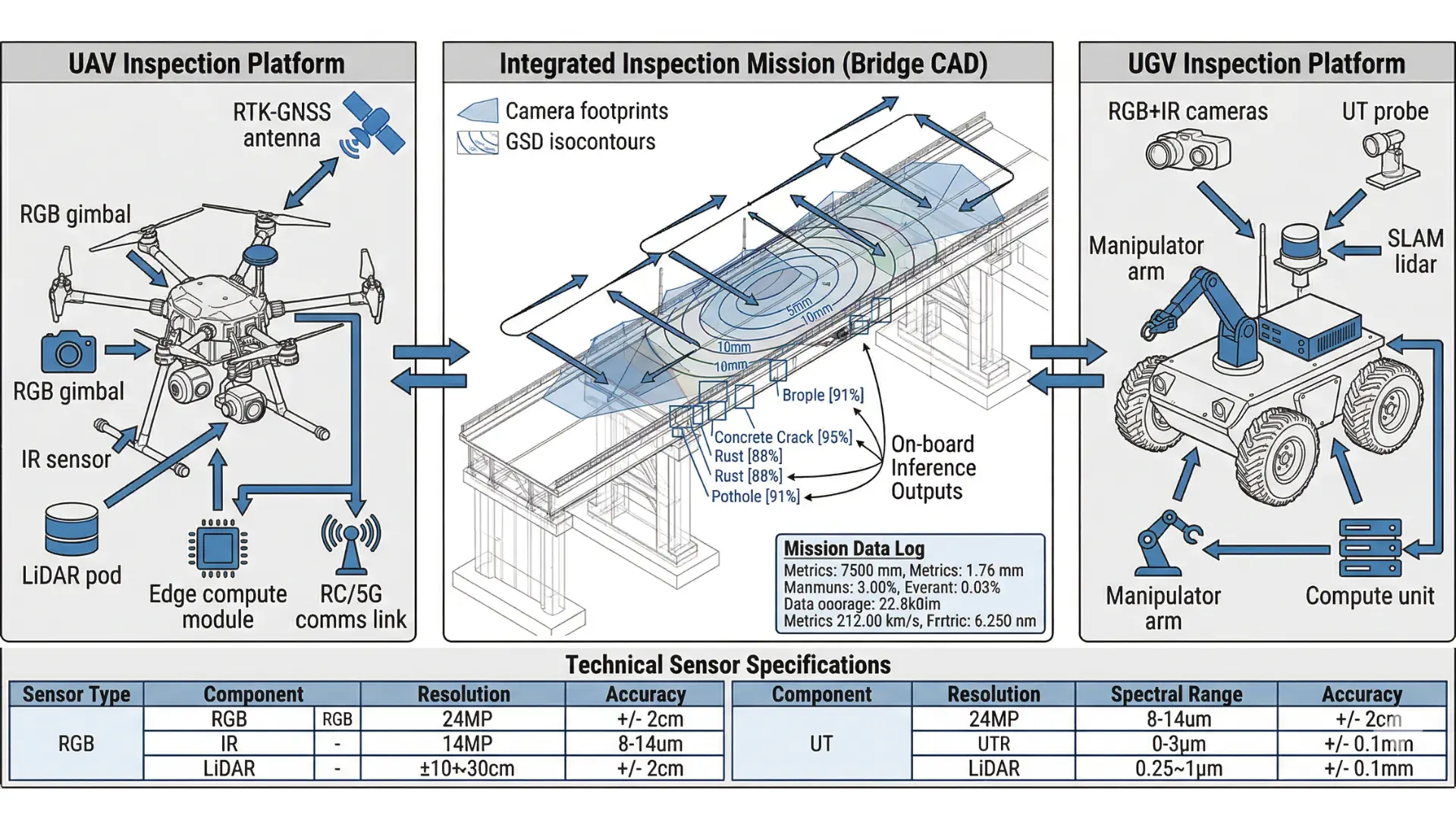
Acquisition Layer: Platforms, Planning, and On-Board Intelligence
Mission Planning and Coverage
Inspection quality hinges on consistent, repeatable coverage. UAV and robot mission planning must consider:
- -Asset geometry, no-fly zones, and safety constraints.
- -Desired ground sampling distance (GSD) and overlap for 3D reconstruction and defect resolution.
- -Environmental conditions (wind, lighting, temperature).
Algorithms for route optimization (e.g., coverage path planning) can be augmented with AI-based saliency-prioritizing areas most likely to contain defects based on historical AI Infrastructure Inspection results or risk models.
On-Board Preprocessing and Edge Inference
On-board capabilities for AI Drone Inspection and rover inspection include:
- -Image deblurring and denoising; basic quality checks.
- -Real-time object detection for collision avoidance and coarse anomaly spotting.
- -Efficient codecs and compression tuned for downstream analytics.
Edge-efficient architectures (e.g., pruned/quantized YOLO variants, MobileNet-based models) enable preview analytics and safety functions without relying on continuous connectivity, making aerial inspection and ground robotics more reliable.
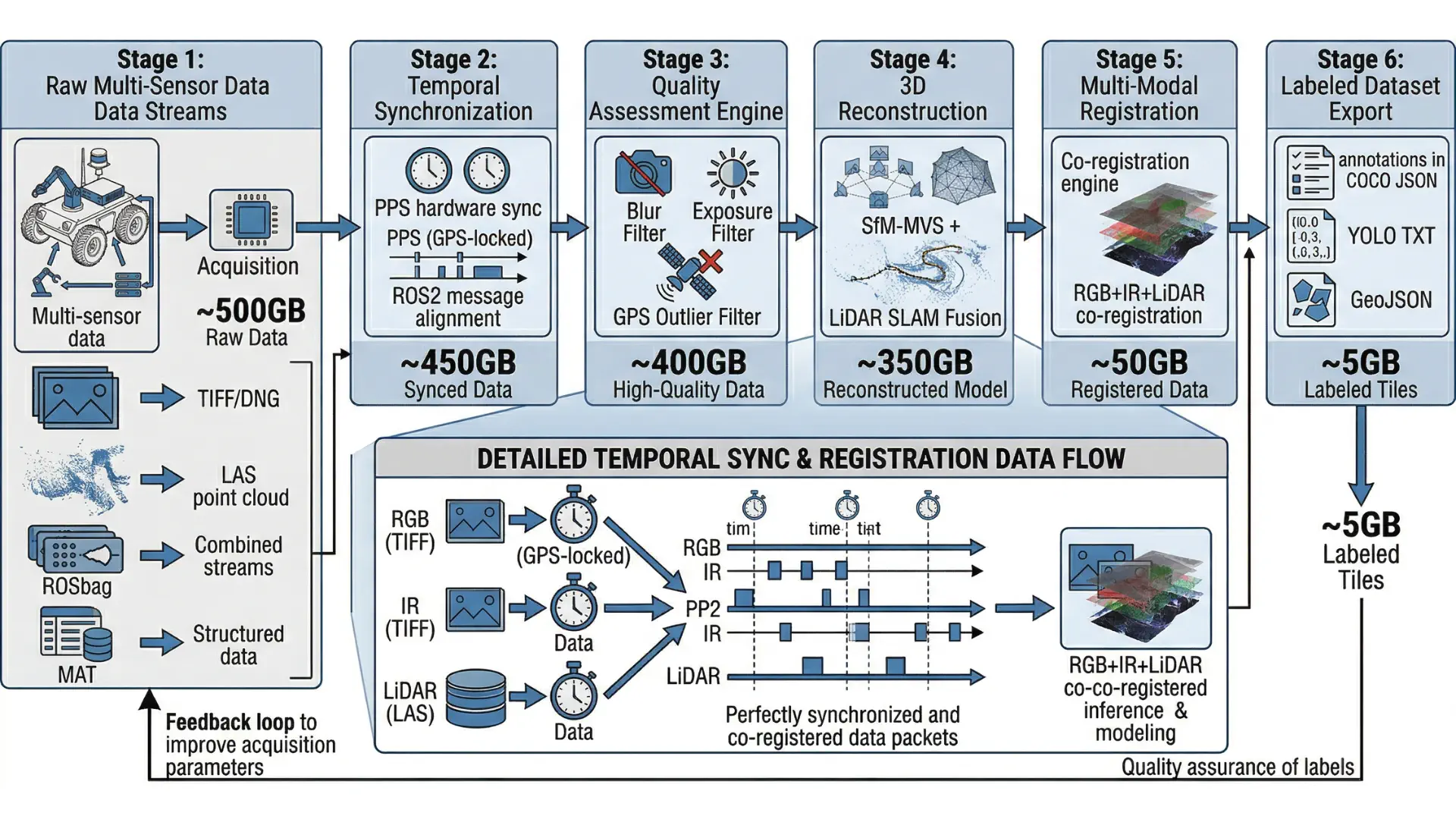
Data Management and Preprocessing Layer
Ingest, Synchronization, and Metadata
A robust ingest pipeline must:
- -Capture sensor data streams (images, point clouds, time series) with time stamps and geolocation.
- -Synchronize multi-modal data (RGB + IR + LiDAR + vibration) using time and position.
- -Attach metadata: asset IDs, inspection campaign IDs, environmental conditions, inspector notes.
3D Reconstruction and Registration
Photogrammetry and LiDAR-based pipelines reconstruct 3D meshes or point clouds, enabling:
- -Accurate localization of defects in asset coordinates.
- -Comparison across inspections (change detection) for long-term Infrastructure Inspection programs.
For multi-modal fusion, robust registration of visible and infrared imagery or other modalities is critical. Recent methods focus on feature learning and robust optimization for such registration under noise.
Data Quality Control and Labeling
Data quality checks filter out blurred, over/under-exposed, or misregistered frames. Semi-automated labeling workflows combine active learning, pre-annotations from existing AI Inspection models, and expert verification to build high-quality datasets for continual model improvement.
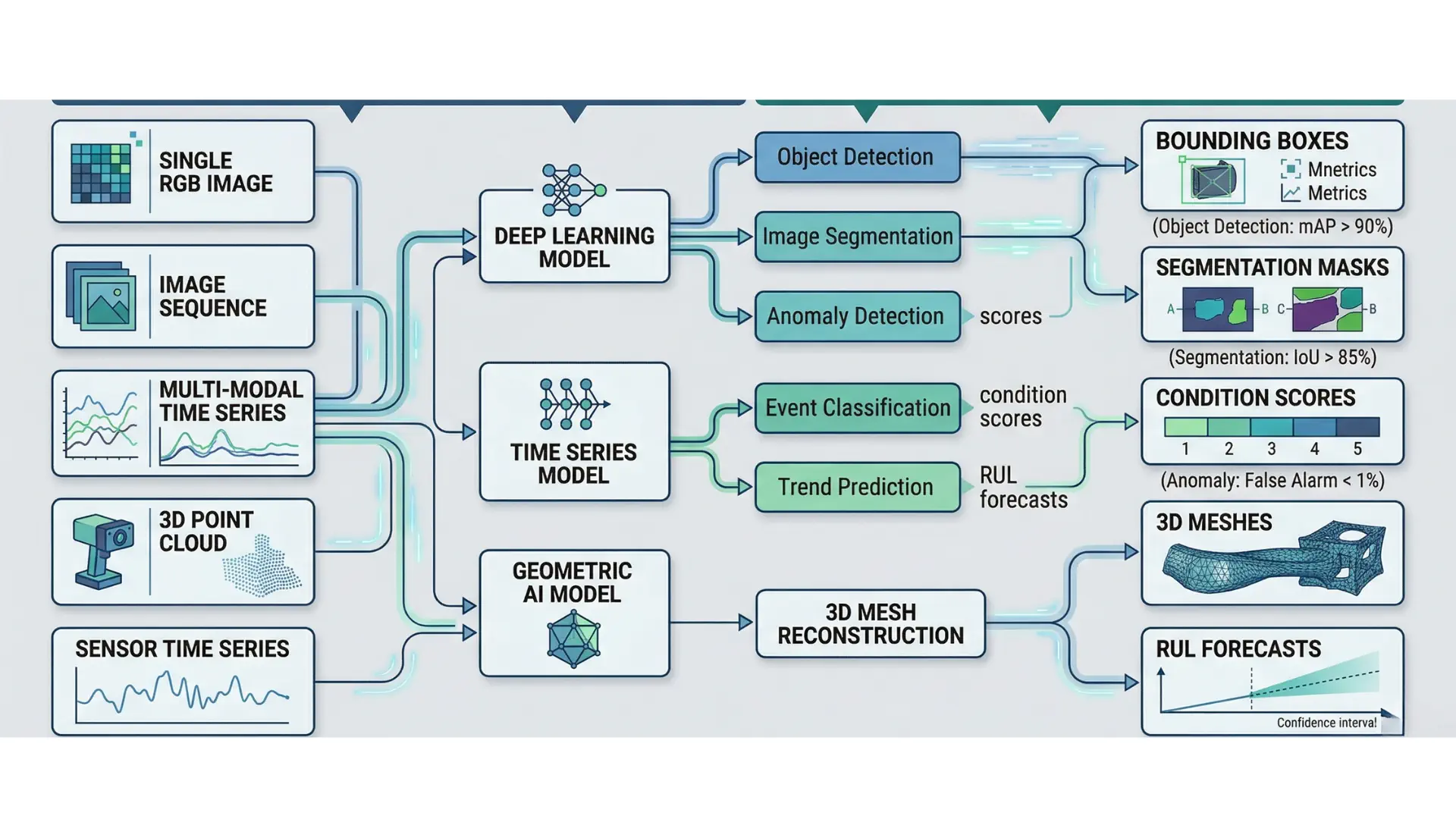
Perception Layer: Single- and Multi-Modal AI
Single-Modality Perception
Single-modality models include:
Object detection:
Towers, insulators, bolts, components, vegetation, vehicles.
Semantic/instance segmentation:
Cracks, spalling, rust, delamination, water seepage, surface anomalies.
Anomaly detection:
Unsupervised or semi-supervised models for rare or unseen defects.
Architectures span classic CNNs, U-Net variants, DeepLab, and transformer-based models for high-resolution segmentation used across AI Infrastructure Inspection deployments.
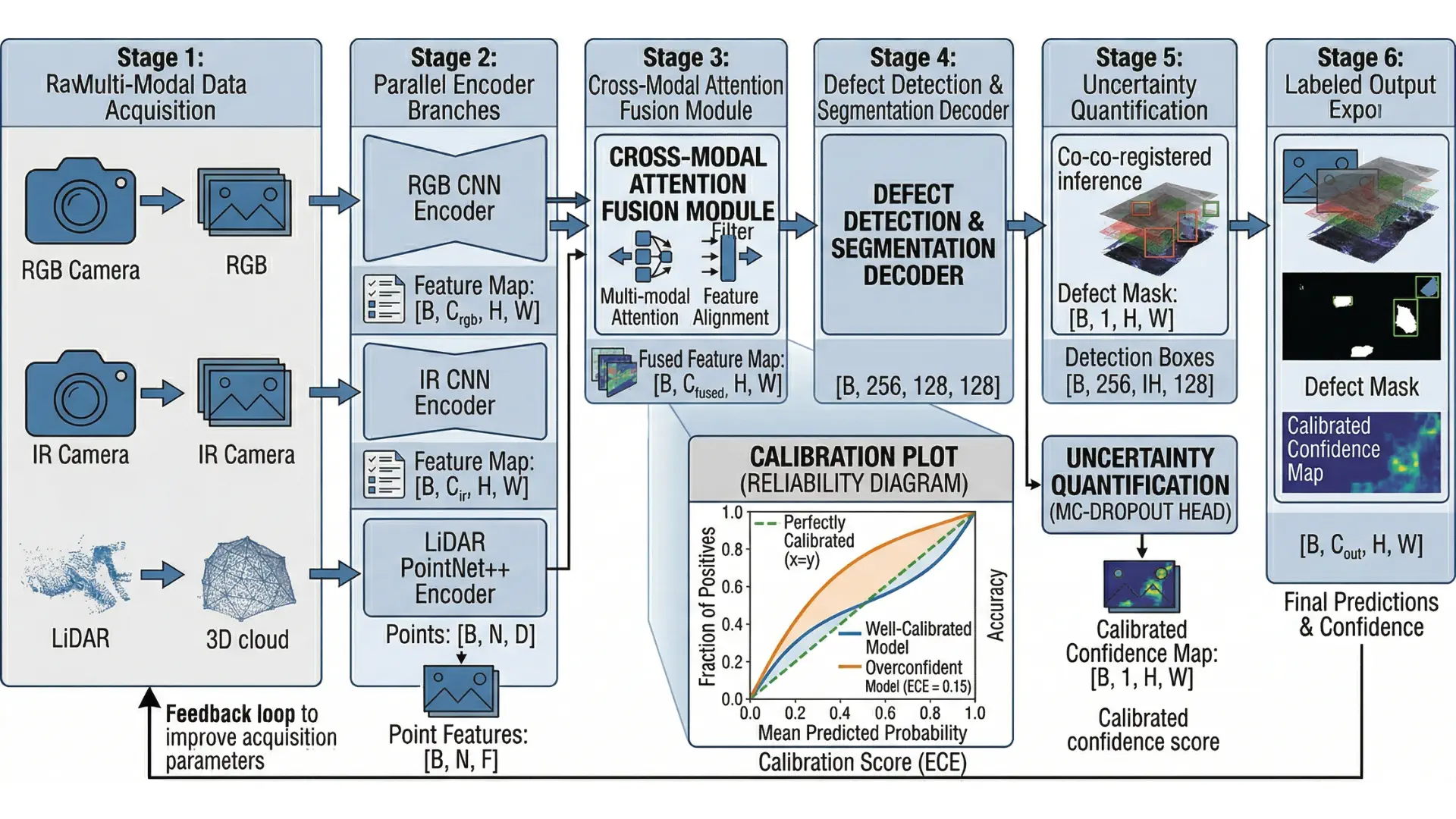
Multi-Modal Fusion Strategies
To leverage complementary signals (e.g., RGB + IR for surface and sub-surface damage, imagery + vibration for dynamic response), fusion can occur at:
Early fusion:
Concatenating channels or embeddings before feature extraction.
Mid-level fusion:
Combining modality-specific feature maps via attention, gating, or graph-based fusion.
Late fusion:
Weighted combination of per-modality predictions (e.g., via stacking or Bayesian ensembling).
Recent work shows that fusing visual imagery with textual inspection notes or condition labels can improve bridge condition assessment, suggesting opportunities for multi-modal representations that include language, CAD/BIM, and engineering metadata in AI in Infrastructure systems.
Uncertainty Estimation and Calibration
For high-stakes decisions, models should expose uncertainty via:
- -Monte Carlo dropout, deep ensembles, or evidential networks.
- -Calibrated probability scores for defect presence and severity.
These scores support prioritized human review and risk-aware decision support for Infrastructure Inspection.
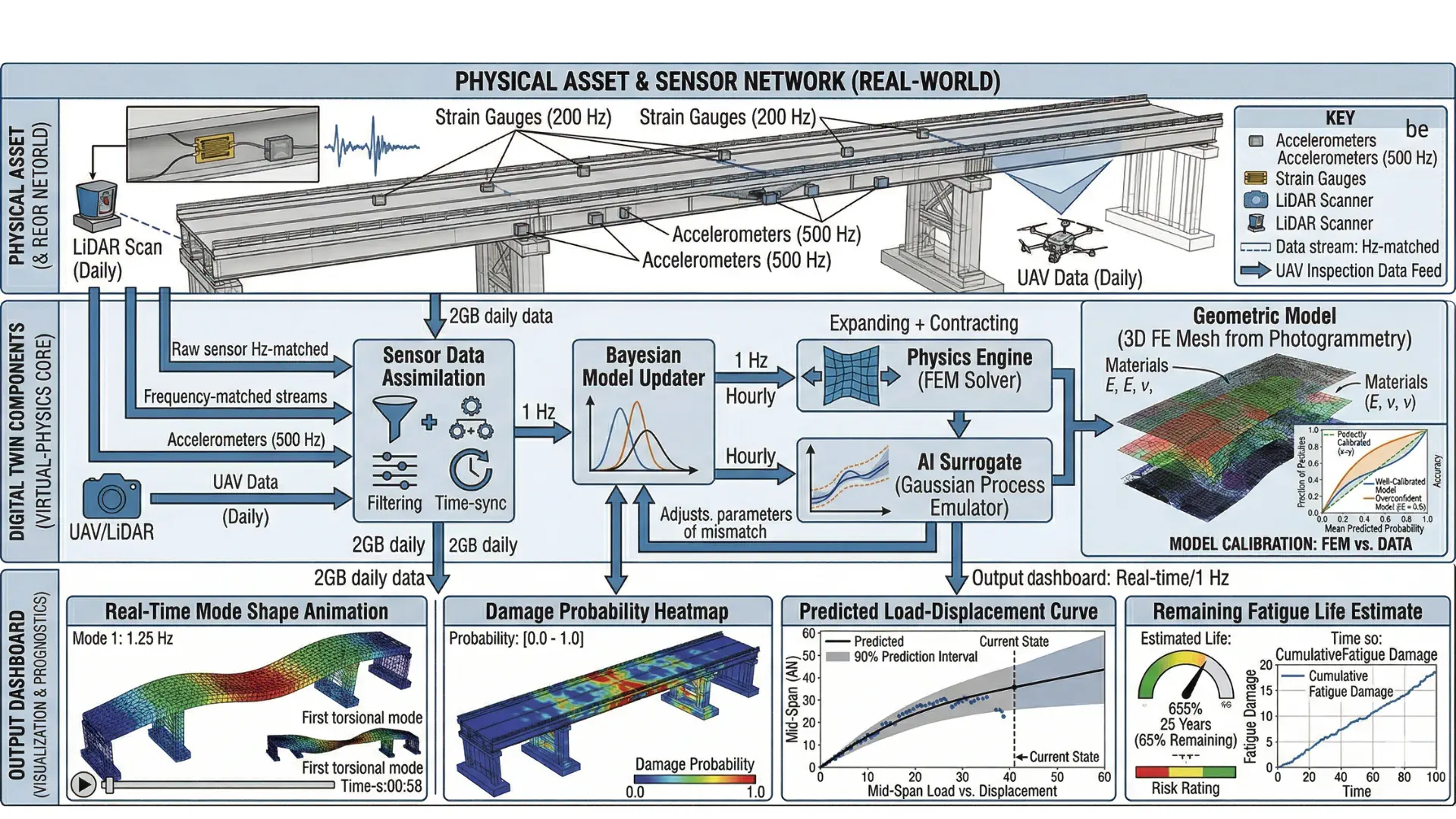
Structural & Asset Modeling Layer: SHM and Digital Twins
Data-Driven SHM and Prognostics
AI models integrate sensor data and defect maps into structural health indicators and forecasts:
- -Modal parameter estimation from vibration time series.
- -Damage localization and quantification via changes in mode shapes or strain fields.
- -Deterioration forecasting using recurrent networks (LSTM/GRU), temporal CNNs, or transformers, conditioned on environmental and loading histories.
Digital Twins and Hybrid Modeling
Digital twins integrate geometry, material properties, and simulation models with live sensor data:
Model updating:
AI-driven system identification aligns simulation outputs with measurements.
What-if analysis:
Simulated responses under hypothetical loads or retrofits.
Lifecycle management:
Tracking interventions, damage, and risk over time.
Hybrid schemes combine physics-based simulations with AI surrogates, enabling fast what-if queries while preserving physical consistency-core to advanced AI Infrastructure Inspection strategies.
Decision Support Layer: From Predictions to Actions
Risk Scoring and Prioritization
Perception and SHM outputs are aggregated into:
- -Defect-level attributes (type, size, location, severity, uncertainty).
- -Element-level condition indices.
- -Asset-level risk scores combining condition, consequence of failure, and redundancy.
Scoring frameworks can follow existing standards (e.g., condition indices, health indices) but enriched with uncertainty and multi-modal evidence from aerial inspection, rover inspection, and fixed sensors.
Human-in-the-Loop Workflows
Decision support must keep engineers and inspectors in control:
- -Ranked queues of assets or locations needing review.
- -Interactive visualization of defects on 2D images and 3D models.
- -Tools to accept, correct, or reject AI suggestions, feeding back into model retraining (active learning).
Integration with Enterprise Systems
Predictions must be integrated into existing systems:
- -Asset management systems: Automatically open or update work orders.
- -CMMS: Link AI findings to maintenance histories.
- -Reporting tools: Generate inspection reports aligned with regulatory formats.
APIs and standardized schemas (JSON/GeoJSON, BIM object links) allow a modular AI in Infrastructure layer to plug into diverse enterprise ecosystems.

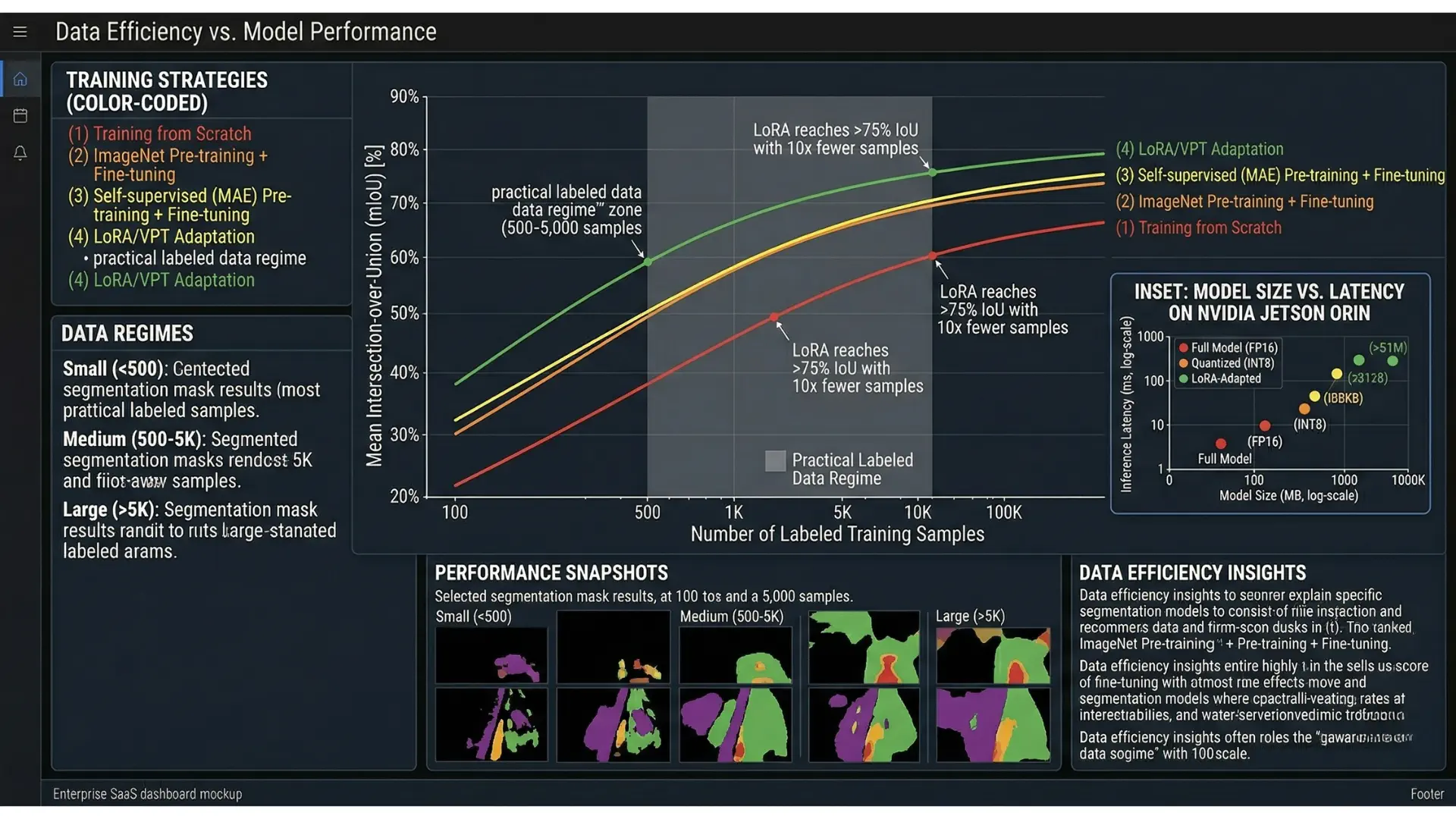
Pretraining, Domain Adaptation, and Parameter-Efficient Tuning
Many Infrastructure Inspection tasks face limited labeled data and domain shift across assets and geographies. Strategies include:
- -Pretraining on generic vision datasets (ImageNet, COCO) and task-specific defect datasets (bridges, power lines).
- -Self-supervised learning on unlabeled inspection imagery and sensor data to learn robust representations.
- -Transfer and multi-task learning across related defect types and assets.
Parameter-efficient finetuning (adapters, low-rank updates, prompts for vision transformers) and quantization enable adapting large models to on-prem or edge environments (including UAVs for AI Drone Inspection) with modest compute budgets-crucial for infrastructure operators with strict data residency constraints.
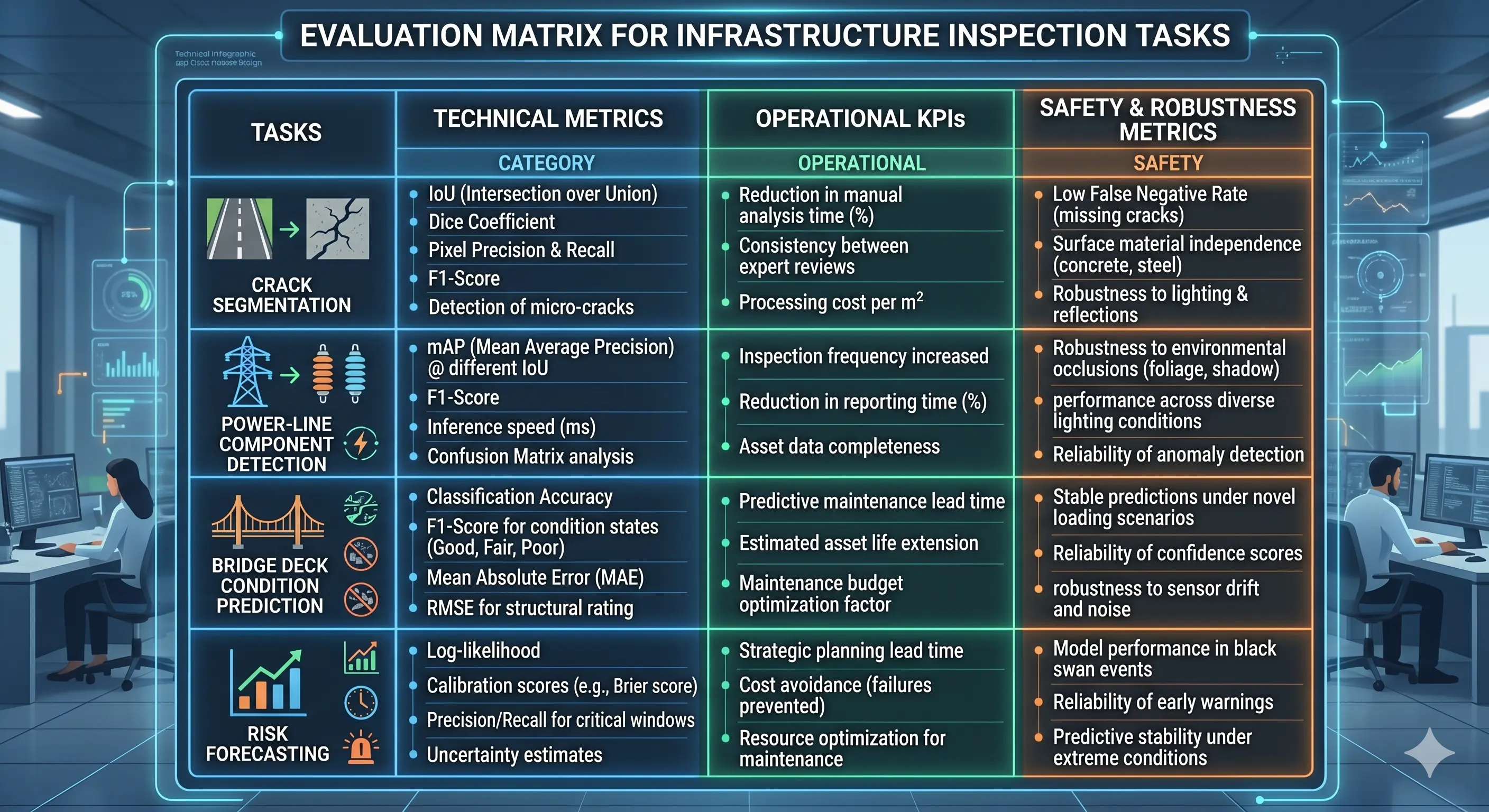
Evaluation and Benchmarking
Model-Centric Metrics
For detection/segmentation:
- -Precision, recall, F1, mean average precision (mAP), IoU, boundary metrics for cracks.
For SHM/prognostics:
- -RMSE/MAE for predicted structural responses; accuracy for damage localization; calibration of risk forecasts.
System-Centric and Operational Metrics
Beyond model metrics, operators care about:
- -Reduction in inspection time and cost via AI Infrastructure Inspection.
- -Increase in coverage and defect detection rate vs. manual inspection.
- -Reduction in unplanned outages and failures.
- -User satisfaction and trust among inspectors and engineers.
Benchmark suites and shared datasets for bridges, power lines, and other assets remain fragmented; recent datasets for reinforced concrete defect detection and UAV-based power line inspection point toward a more standardized ecosystem, but coverage is still limited.
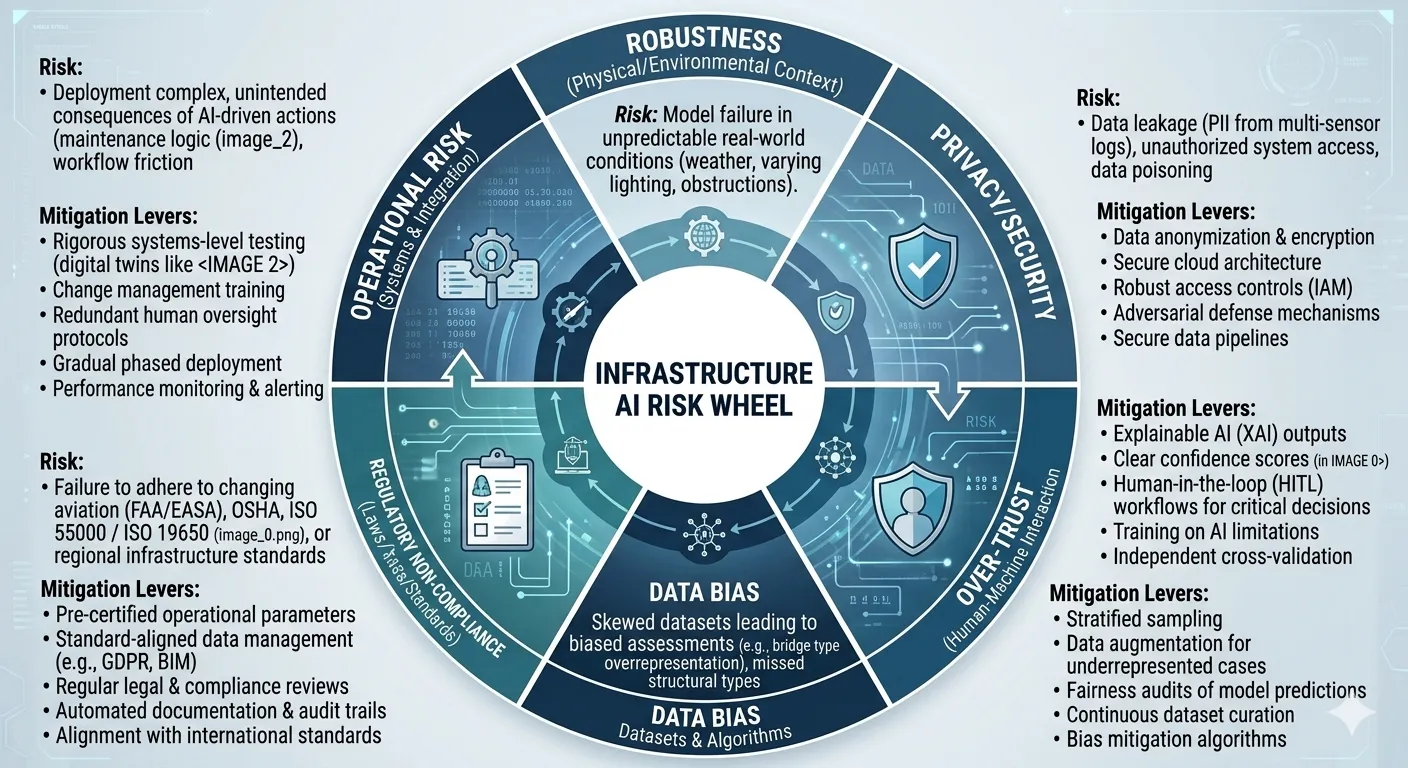
Robustness, Safety, and Responsible Deployment
Infrastructure AI systems must handle distribution shifts (lighting, weather, camera changes), adversarial environments (dirty lenses, occlusions), and evolving asset conditions.
Key concerns:
Robustness:
Data augmentation, domain randomization, and test-time adaptation to handle real-world variability.
Uncertainty and over-trust:
Avoiding overconfident predictions; designing interfaces that surface confidence and evidence to humans.
Privacy and security:
Protecting sensitive asset and location data, securing communication between devices and servers.
Bias and equity:
Ensuring that AI Infrastructure Inspection quality does not disproportionately vary across regions or asset types with differing data density.
Governance frameworks should define acceptable use, audit trails (who overrode which AI recommendation), incident reporting, and periodic external reviews-especially for critical infrastructure.
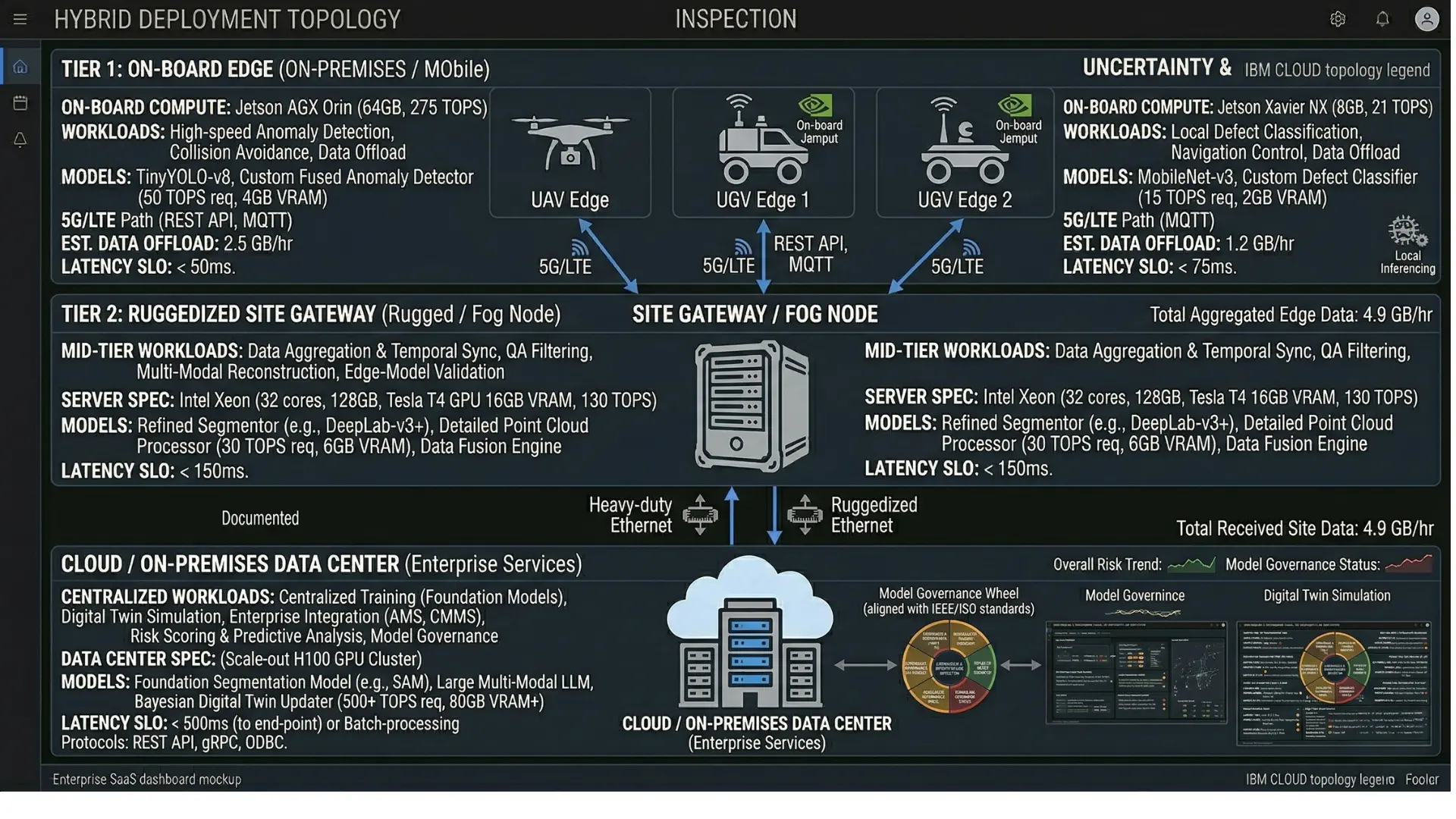
Deployment Patterns: Edge, Cloud, and Hybrid
Edge-Centric Patterns
- -On-board inference for safety (collision avoidance, no-fly enforcement) and preliminary defect detection in AI Drone Inspection and rover inspection.
- -Local buffering with intermittent sync to cloud or on-prem servers.
Cloud/On-Prem Patterns
- -Centralized training and heavy inference (e.g., full-resolution 3D reconstruction, multi-modal fusion).
- -Integration with digital twins, asset management, and analytics stacks for AI in Infrastructure programs.
Hybrid Optimization
- -Dynamic routing: lightweight models at the edge, heavier ones in the cloud for ambiguous cases.
- -Latency and cost budgeting across mission planning, ingest, and inference; use of batching and hardware acceleration.
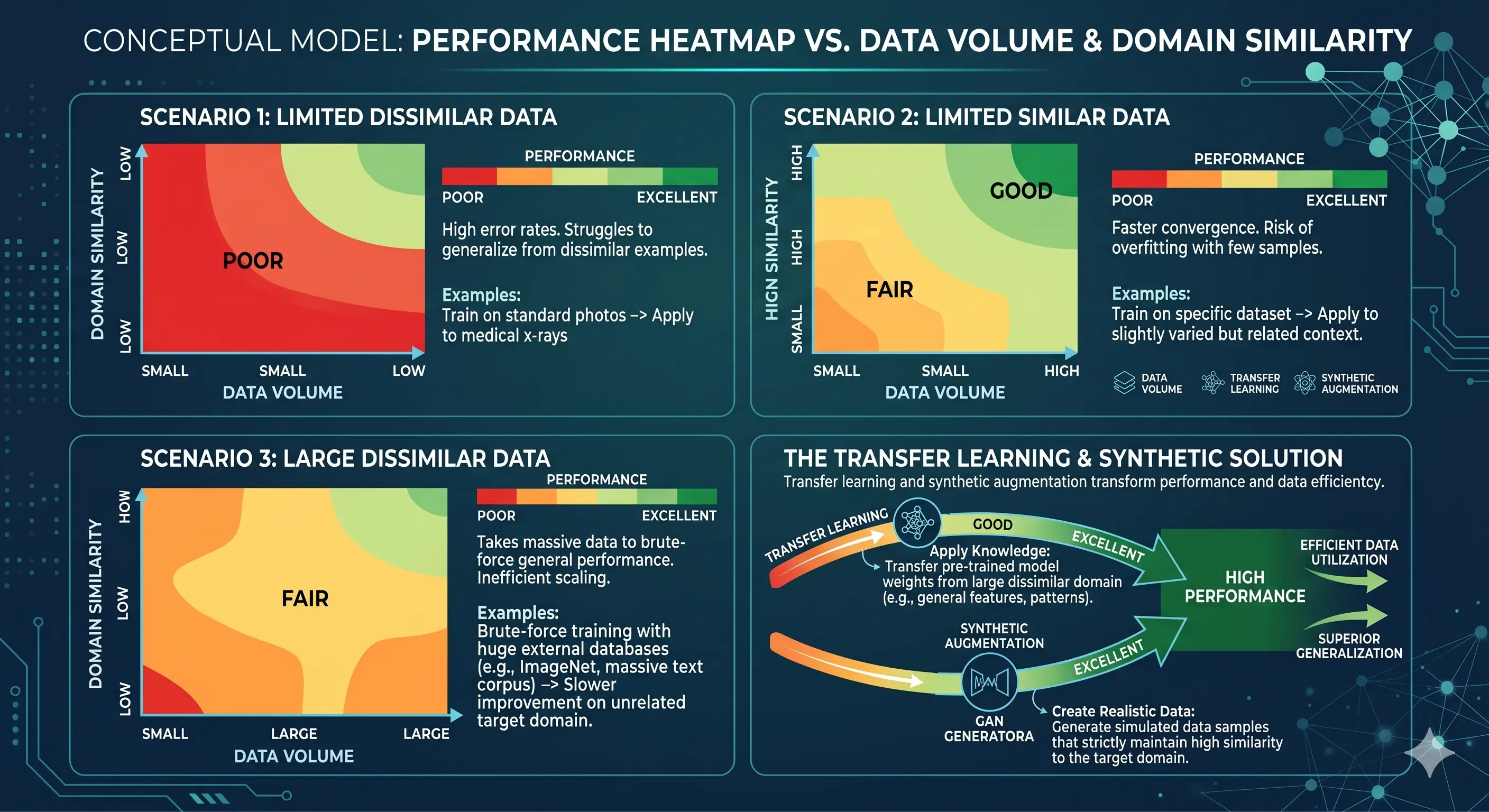
Low-Data Regimes, Domain Shift, and Cross-Asset Transfer
Infrastructure domains often have:
- -Limited labeled data for rare defects (e.g., fatigue cracks, early-stage corrosion).
- -Varying materials and construction practices across regions.
Mitigation strategies:
- -Few-shot and meta-learning for adapting to new defect types with few examples.
- -Cross-asset transfer: using shared encoders across bridges, tunnels, and buildings, with asset-specific heads.
- -Synthetic data from simulations and generative models to augment underrepresented conditions.
Failure Modes and Diagnostics
System-level failure modes in AI Infrastructure Inspection include:
Coverage failures:
Blind spots in mission planning lead to unobserved defects in aerial inspection or rover inspection campaigns.
Perception failures:
Missed small cracks; false positives from shadows, specular highlights, or vegetation.
Fusion errors:
Misregistration between modalities causing mislocalized or spurious defects.
SHM/digital twin mismatch:
Divergence between simulated and measured responses due to modeling errors or sensor drift.
| Fault Type | Root Causes | Detection Signals | Mitigation Strategies |
|---|---|---|---|
| Coverage (Data Acquisition) | • GPS denial in dense structural environments • Occlusion (e.g., scaffolding, heavy vegetation) • Suboptimal UAV/rover path planning • Inadequate sensor Field of View (FOV) | • Topological gaps or "holes" in 3D point clouds • Low overlap percentage in photogrammetry logs • Incomplete asset regions within the Digital Twin | • Implementation of SLAM for GPS-denied navigation • Redundant, multi-angle automated flight paths • Active obstacle avoidance with dynamic trajectory replanning |
| Perception (Machine Vision) | • Severe environmental degradation (glare, motion blur, precipitation) • Domain shift (e.g., model trained strictly on concrete applied to steel) • Sensor lens degradation or thermal drift | • Chronically low confidence scores during inference • Bounding box "flickering" across sequential video frames • High rate of false positives triggered by environmental artifacts | • Aggressive synthetic data augmentation for rare edge cases • Deployment of ensemble modeling architectures • Hardware integration of High Dynamic Range (HDR) and polarized sensors |
| Fusion (Multi-Modal Alignment) | • Temporal desynchronization (internal sensor clock drift) • Poor spatial registration (extrinsic calibration errors) • Conflicting sensor signatures (e.g., LiDAR detects an obstacle, RGB does not) | • Noticeable "ghosting" artifacts in 3D projections • Spatial mismatch between thermal heatmaps and RGB visual defects • Consistently high reprojection error rates | • Hardware-level Precision Time Protocol (PTP) synchronization • Continuous, automated extrinsic auto-calibration algorithms • Uncertainty-aware sensor weighting during the fusion stage |
| Modeling (Predictive Analytics) | • Concept drift over the asset's lifecycle • Overfitting to specific structural typologies during training • Inaccurate assumptions regarding physical degradation rates | • High Root Mean Square Error (RMSE) in Remaining Useful Life (RUL) forecasts • Unexplained, erratic spikes in predicted risk scores • Significant deviation from baseline historical degradation curves | • Integration of Physics-Informed Neural Networks (PINNs) • Automated, continuous model retraining pipelines • Mandatory Human-in-the-Loop (HITL) validation for high-severity anomaly detection |
| Integration (System Architecture) | • Edge-to-cloud bandwidth throttling or disconnections • Incompatible data ontologies (e.g., BIM vs. GIS vs. raw Point Cloud) • API latency or database transaction timeouts | • Unacceptable API timeout rates • Stale, lagging telemetry on the asset management dashboard • Dropped multi-sensor data packets • Schema validation errors during data ingest | • Intelligent edge-caching to ensure zero data loss during connectivity drops • Adoption of standardized global ontologies (IFC/CityGML) • Asynchronous message queues (e.g., Kafka) for robust data pipelining |
Case Study Templates
Bridges: UAV-Based Visual + IR Inspection
Objective:
Automate deck and superstructure inspections, producing condition ratings and defect maps with AI Inspection models.
Pipeline:
UAV mission planning → RGB+IR capture → 3D reconstruction → crack/spalling segmentation → deck delamination inference via IR → digital twin update → risk-based prioritization.
Power Lines: Multi-Modal Inspection and Vegetation Risk
Objective:
Detect component defects, hotspots, and vegetation encroachment via AI Drone Inspection.
Pipeline:
UAV with RGB+IR → line and tower detection → insulator and hardware defect classification → vegetation risk scoring from imagery and LiDAR.
Industrial Plants: Integrated Visual and Sensor-Based SHM
Objective:
Monitor tanks, pressure vessels, and pipe racks using visual inspection plus fixed sensors as part of a unified AI Infrastructure Inspection strategy.
Pipeline:
Periodic robotic visual scans (including rover inspection) + continuous vibration/strain monitoring → multi-modal fusion → anomaly detection → digital twin update for process safety decisions.
Open Problems and Research Directions
Despite progress, several challenges remain for AI Infrastructure Inspection:
- -Standardized benchmarks and datasets across assets, modalities, and climates, with well-defined protocols for evaluation and cross-domain generalization.
- -Self-calibrating digital twins that continuously learn from new data, interventions, and environmental changes while maintaining physical plausibility.
- -Causal and physics-informed AI, bridging purely data-driven models with engineering knowledge to improve extrapolation under novel conditions.
- -Scalable, privacy-preserving analytics enabling cross-operator learning without sharing sensitive raw data (e.g., federated learning).
- -Human factors and UX, including trust calibration, explanation of AI decisions to non-ML experts, and training for inspectors to effectively collaborate with AI Inspection tools.
Conclusion
This paper has presented a modular AI architecture for multi-modal Infrastructure Inspection, spanning acquisition, data management, perception, structural modeling, and decision support. By decoupling layers and adopting standardized representations, organizations can move from isolated pilots to scalable, cross-asset platforms for AI in Infrastructure. Multi-modal fusion, digital twins, and predictive analytics promise to transform inspection from periodic, reactive activities into continuous, proactive asset management.
However, technical sophistication must be paired with careful attention to robustness, safety, governance, and human-centered design. Responsible deployment requires rigorous evaluation, transparent workflows, and ongoing collaboration between AI practitioners, civil engineers, regulators, and operators.
For practitioners, a pragmatic path forward is to: (i) establish a modular data and perception stack; (ii) pilot digital twins for high-value assets; (iii) integrate AI outputs from AI Drone Inspection, rover inspection, and fixed sensors into existing decision workflows; and (iv) continuously iterate with field feedback and governance frameworks. With these principles, modular multi-modal AI Infrastructure Inspection can help build safer, more resilient, and more sustainable infrastructure systems.
References
1. Y. Yang et al., "A Review of Recent Advances in Data-Driven Computer Vision Algorithms for Structural Damage Detection," Arch Computat Methods Eng, 2025. SpringerLink
2. S. Li et al., "Computer Vision-Based Bridge Inspection and Monitoring: A Review," Sensors, 2023. MDPI
3. Y. Luo et al., "Deep Learning in Automated Power Line Inspection: A Review," Applied Energy, 2025. ScienceDirect
4 T. Zhou et al., "Robust Multi-Modal Image Registration for Image Fusion in Non-Destructive Evaluation," Sensors, 2024. MDPI
5 H. Zhang et al., "Multi-Modal Deep Fusion for Bridge Condition Assessment," J Infrastruct Preserv Resil, 2023. ScienceDirect
6 J. Kim et al., "Automated Bridge Surface Crack Detection and Segmentation Using Deep Learning," Engineering Applications of Artificial Intelligence, 2022. ScienceDirect
7 A. Kompanets et al., "Deep Learning for Segmentation of Cracks in High-Resolution Images of Steel Bridges," arXiv, 2024. arXiv
8 X. Wang et al., "Review on Computer Vision-Based Crack Detection and Quantification," Construction and Building Materials, 2022. ScienceDirect
9 J. Wu et al., "Automated Crack Detection and Mapping of Bridge Decks Using Deep Learning and UAVs," Innovative Infrastructure Solutions, 2023. SpringerLink
10 R. Zhang et al., "Automated Bridge Crack Detection Method Based on Lightweight Vision Models," Complex & Intelligent Systems, 2022. SpringerLink
11 M. Silva et al., "UAV Visual and Thermographic Power Line Detection Using Deep Learning," Sensors, 2024. MDPI
12 J. Zhang et al., "Automatic Autonomous Vision-Based Power Line Inspection: A Review," Electric Power Systems Research, 2018. ScienceDirect
13 A. Harle et al., "Artificial Intelligence and Data Analytics for Structural Health Monitoring," Arch Computat Methods Eng, 2025. SpringerLink
14 X. Li et al., "Deep Learning-Driven Multi-Level Data Fusion Framework for Predictive Bridge Deck Conditions," Automation in Construction, 2025. ScienceDirect
15 L. Zhang et al., "Image-Based 3D Reconstruction for Multi-Scale Civil and Infrastructure Assets," Automation in Construction, 2023. ScienceDirect
16 F. Jiang et al., "Structural Health Monitoring System Based on Digital Twins and Real-Time Data," Engineering Structures, 2024. ScienceDirect
17 T. Animashaun et al., "AI-Powered Digital Twin Platforms for Next-Generation Structural Health Monitoring," J Eng Res Review, 2025. journaljerr.com
18 Z. Chen et al., "Advances in Computer Vision-Based Civil Infrastructure Inspection and Monitoring," Engineering, 2019. ScienceDirect
19 A. Saseethar et al., "Revolutionising Visual Bridge Inspection: A Deep Learning Approach for Automated Concrete Bridge Distress Identification," 2024. ResearchGate
20 M. Weber et al., "Overview and Challenges of Computer Vision-Based Visual Inspection for Bridge SHM," SHMII-13, 2024. University of Twente Research