Mobile AI for Inspection in Remote or Hazardous Environments
Abstract
Industrial inspection is increasingly pushed to the edge of operations: to mines kilometers underground, offshore platforms hundreds of kilometers from shore, and disaster zones where infrastructure is damaged and connectivity is intermittent. In these environments, conventional inspection workflows based on paper forms, laptops, or specialized cameras are often impractical, slow, and fragile. At the same time, rugged smartphones and tablets, 5G and low-power wide-area network (LPWAN) connectivity, and efficient on-device artificial intelligence (AI) are enabling a new generation of mobile inspection solutions that use commodity cameras and sensors to perform AI-assisted inspection directly in the field.
This paper examines the usability and reliability of mobile AI inspection in remote and hazardous environments, with a focus on mines, offshore rigs, and disaster-response scenarios. We define the concept of a mobile AI inspection application, propose a reference architecture for the underlying inspection process, and analyze requirements for offline-first operation, ruggedized hardware, and human-centered design. We survey emerging industrial inspection deployments and research prototypes, including offline-capable mobile inspection platforms for oil and gas and marine operations, rugged ATEX-certified tablets and smartphones for hazardous areas, and AI-powered mobile application designs for disaster prediction and emergency coordination.
We propose a modular architecture that combines on-device computer vision, optical character recognition (OCR), and anomaly detection with offline data stores, synchronization engines, and cloud backends. We discuss human factors, including gloved operation, low-light visibility, and cognitive load, and reliability issues, including model drift, harsh environmental conditions, and device failure. Finally, we outline evaluation criteria and research directions for mobile AI inspection applications, covering the accuracy of on-device models, end-to-end task completion under network constraints, rugged-device performance, and user acceptance among inspectors and first responders.
Introduction
Inspection in remote or hazardous environments is essential for asset integrity, safety, and regulatory compliance. Representative settings include underground mines and quarries, characterized by tunnels, dust, humidity, and potential gas accumulation; offshore platforms and marine vessels exposed to salt spray, vibration, and severe weather; and disaster zones following earthquakes, floods, or industrial accidents, where infrastructure is damaged, access is constrained, and connectivity is unreliable.
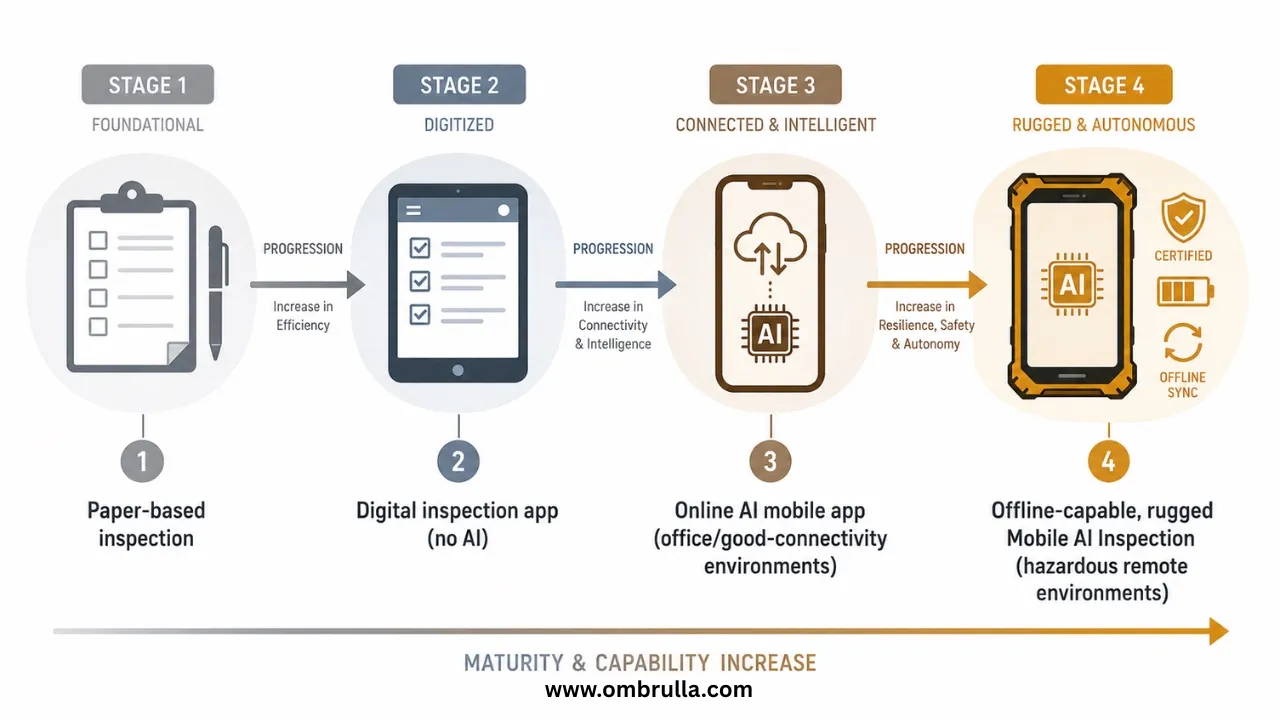
Historically, inspections in these settings have depended on paper checklists, non-intelligent digital cameras, or rugged laptops, with data entry and analysis performed largely manually and substantial delays between inspection and analysis. Three recent developments are changing this landscape: rugged smartphones and tablets certified for explosive atmospheres under ATEX or IECEx standards and engineered for high temperature, vibration, dust, and moisture; mature mobile inspection application ecosystems that support digital forms, photo and video capture, and online/offline synchronization; and edge-optimized AI models for image analysis, defect detection, and document OCR running directly on mobile devices, effectively turning the smart device itself into a self-contained inspection instrument.
We use the term mobile AI inspection to denote inspection workloads in which a mobile application uses on-device or near-edge AI to analyze camera feeds or sensor data and returns actionable results in the field, even under low-connectivity conditions. When packaged with robust offline capabilities, such an application supports a continuous inspection process flow: capture, AI analysis, local decision support, and eventual synchronization with central systems.
This paper makes four contributions. First, it characterizes the environments and use cases in which mobile AI inspection is most valuable (Section 3). Second, it proposes a reference architecture for an inspection application that is usable and reliable in these contexts (Sections 4 and 5). Third, it assesses offline and ruggedization requirements alongside the human factors that govern field usability (Sections 6 through 8). Fourth, it provides an evaluation framework, governance recommendations, and research directions for practitioners and researchers (Sections 10 through 13).
Related Work
This paper draws on three overlapping bodies of work: enterprise mobile inspection platforms, ruggedized and intrinsically safe mobile hardware, and edge AI for visual inspection tasks.
Commercial mobile inspection platforms targeting oil and gas, marine, and mining operations have established offline-first data capture and synchronization as a baseline requirement, given the intermittent connectivity typical of these sites. These platforms have historically focused on digitizing checklists and structured forms, with AI-based analysis offered as a more recent, often optional, enhancement layered on top of the data-capture workflow. Separately, a substantial body of industrial design and certification work has matured the hardware side of this problem: ATEX- and IECEx-certified rugged smartphones and tablets are now widely available, engineered to prevent ignition in explosive atmospheres while remaining usable with gloved hands and in direct sunlight or darkness.
On the AI side, lightweight computer-vision architectures and on-device runtimes, of the kind surveyed in the broader edge-AI literature, have made real-time defect detection, segmentation, and OCR feasible on commodity mobile hardware. Applied work in adjacent domains, including AI-powered disaster-alert applications and computer-vision frameworks for manufacturing inspection, demonstrates that AI-driven decision support can be packaged into mobile-first tools, though this prior work generally targets either well-connected environments or non-inspection use cases such as alerting.
This paper differs from prior work in three respects. It treats offline-first operation, ruggedization, and human-centered design as co-equal first-class requirements alongside model accuracy, rather than as secondary deployment concerns. It synthesizes design guidance across three distinct hazardous-environment classes (mining, offshore, and disaster response) within a single reference architecture, rather than treating each vertical in isolation. It also proposes a joint technical and human-centered evaluation framework (Section 10) intended to support direct comparison across deployments and device classes.
Use Cases and Operating Environments
Mining and Subsurface Operations
In underground mines, inspectors and technicians must routinely assess ground support conditions, including strata, rock bolts, and mesh; ventilation and gas-monitoring equipment; and the condition of conveyors, crushers, and mobile equipment. These tasks occur in low-light, dusty environments with potential gas or explosion risk, and rugged, intrinsically safe smartphones and tablets are widely adopted to support digital inspection and communication in this setting.
A mobile inspection application with embedded AI can use computer vision to identify cracks, spalling, or scaling on walls; read gauge values on pumps or fans via OCR; and detect blocked ventilation ducts or standing water using image classification. Because connectivity may be limited deep underground, the application must buffer captured data and AI outputs locally, synchronizing once backhaul connectivity, such as Wi-Fi or fiber at a shaft station, becomes available.Offshore Rigs and Marine Platforms
Offshore rigs and marine vessels require regular inspection of corrosion and coating condition on topsides and hulls; safety equipment, including fire and gas detectors and lifeboats; and rotating equipment, pipelines, and structural elements. Existing mobile inspection deployments on oil platforms and marine vessels enable inspectors to record findings and synchronize to central systems over intermittent satellite or Wi-Fi links.
In this setting, a mobile AI inspection workflow can perform AI-based corrosion detection and severity estimation from smartphone images, detect missing or obstructed signage and safety markings, and flag anomalies in cable trays or hose routing. Given the explosion risk present on many offshore assets, the application must run on certified, intrinsically safe, rugged devices able to withstand salt spray, vibration, and impact.Disaster Zones and Emergency Response
Disaster responders must quickly assess structural damage to buildings and bridges; hazards such as gas leaks, chemical spills, or unstable debris; and victim locations and access routes. Existing AI-powered mobile applications for disaster alerting and situational awareness demonstrate that AI functionality can be packaged into mobile devices for real-time decision support in this domain.
A mobile AI inspection tool for disaster response can use segmentation models to detect cracked columns, spalled concrete, or leaning walls from quick photographs; overlay AI-detected hazard zones on offline maps; and use on-device models to support triage in the complete absence of connectivity.

Defining Mobile AI Inspection and the Inspection Process
Mobile AI Inspection: Concept
We define mobile AI inspection as a field inspection workflow in which a mobile application running on a smartphone or tablet captures images, video, or sensor data and applies AI models, either locally or on a nearby edge server, to perform inspection analysis, identifying defects, anomalies, or compliance issues in near real time.
In contrast to traditional inspection applications that merely digitize checklists, a mobile AI inspection application integrates computer vision, including object detection, segmentation, and OCR; in some cases audio and natural-language processing, such as voice notes and transcription; and decision logic, including rules, thresholds, and risk scoring. This fusion allows inspectors to use the application as a co-pilot: the AI component suggests findings, pre-fills defect categories, or highlights areas needing closer review, while the inspector retains final judgment.The Mobile AI Inspection Process
A typical mobile AI inspection process in a hazardous environment proceeds through five stages. In pre-mission setup, the inspector downloads relevant checklists, models, and reference data to the device in an offline-first manner, and confirms device health, including battery, storage, and sensor checks. In field capture, the inspector navigates the asset, such as a mine drift, vessel deck, or building, and uses the application to capture photos and video and to fill structured fields, optionally via voice dictation. In on-device AI inference, the application runs models locally to detect cracks, corrosion, missing bolts, or gauge readings, flagging suspected defects and overlaying bounding boxes or segmentation masks on the captured image. In local decision support, the inspector accepts or rejects each AI suggestion, and the application may assign a preliminary severity rating or recommend an immediate action, such as barricading an area or halting hot work. In offline storage and synchronization, data and AI outputs are stored securely on the device, and once connectivity returns, the application synchronizes with the central server, resolving conflicts and updating reports.

Reference Architecture for a Mobile AI Inspection Application
On-Device Components
A robust mobile AI inspection architecture for hazardous environments comprises five on-device components. The UI layer is touch- and gesture-optimized, with high-contrast design and large controls usable with gloves. The data capture layer provides the camera interface for photos, video, and individual frames, together with sensor access for accelerometer, GPS, and environmental sensors, and local metadata collection. The AI inference engine is an on-device runtime, such as TensorFlow Lite, ONNX Runtime Mobile, or Core ML, optimized to run quantized models that reduce compute and power consumption. Local storage takes the form of an encrypted database, such as SQLite, holding forms, media, and AI outputs. The sync engine is a background service that manages queued operations, retries, conflict resolution, and data compression. Together, these components form the core of an application that can operate independently of the network for extended periods.
Backend and Integration
While the on-device application must be fully capable offline, most deployments also involve a backend layer with three components. A cloud or on-premises server provides long-term storage, supports heavy model training, and enables fleet-wide analytics. A set of APIs supports integration with asset registries, work orders, and existing computerized maintenance management system (CMMS) or enterprise asset management (EAM) platforms. A model management layer pushes updated models to devices, controls phased rollout, and logs inference telemetry for monitoring and continuous improvement.

Usability in Remote and Hazardous Contexts
Human Factors and Interaction Design
Usability of mobile AI inspection in mines, offshore rigs, and disaster zones is constrained by three recurring human factors. Personal protective equipment, including gloves, goggles, and face shields, limits fine motor control and visibility. Noise and lighting conditions, frequently loud and either very dim or harshly bright, complicate both speech-based and visual interaction cues. Cognitive load is elevated because inspectors must simultaneously manage safety, navigation, and task complexity.
These constraints motivate four design principles for the inspection application: large tap targets with minimal reliance on precise gestures; clear, high-contrast user-interface design, including dark-mode options that preserve night vision; structured workflows with step-by-step guidance and checklists; and voice capture with offline speech-to-text where feasible.AI Assistance and Trust
AI suggestions within the inspection workflow must be presented in an interpretable and non-intrusive way. This includes overlays on captured images with simple confidence indicators; explicit accept, adjust, or reject controls for each AI finding; and clear fallback behavior when the model is uncertain or the device is offline. Field studies of AI-supported inspection suggest that inspector trust increases when the application provides explanations, such as attention heatmaps, and when inspectors can easily override AI decisions without penalty or friction.

Reliability and Rugged Device Performance
Ruggedization and Intrinsic Safety
In remote and hazardous environments, the reliability of a mobile AI inspection application is tightly coupled to hardware robustness. Rugged and intrinsically safe devices are designed to withstand drops, vibration, dust, and water ingress, typically to an IP65 rating or higher; to operate across wide temperature ranges; and to prevent ignition in explosive atmospheres, as certified under ATEX or IECEx standards. Such devices commonly feature reinforced screens usable with gloves and wet fingers, extended or hot-swappable batteries, and dedicated hardware buttons for critical functions such as panic alerts or camera capture. The application itself must recognize device-level constraints, including storage, CPU and GPU capacity, and battery state, and adapt model selection and sampling rate accordingly.
Failure Modes and Mitigations
Reliability in this domain depends on anticipating three categories of failure. Hardware failure includes broken screens, failed buttons, and battery degradation. Sensor degradation includes camera-lens scratches or fouling that reduce image quality. Model drift refers to AI performance degrading under new conditions not well represented in training data, such as a new coating type or unfamiliar lighting. Corresponding mitigations include automated device health checks that alert on abnormal camera or sensor readings; periodic test images against known reference targets to verify ongoing model performance; and controlled, staged rollout of updated models using canary deployments with rollback paths if performance regresses.
| Fault Type | Root Causes | Detection Signals | Mitigation Strategies |
|---|---|---|---|
| Hardware failure | • Cracked screen, failed hardware button • Battery degradation • Sensor misalignment | • Device self-diagnostics alerts • User-reported faults • Battery health API anomalies | • Scheduled hardware inspection • Spare-device rotation • Hot-swappable battery policy |
| Sensor degradation | • Scratched or fouled camera lens • Misaligned accelerometer • Lens thermal drift | • Periodic reference-image capture vs. baseline • Image-quality scoring decline • Sensor self-test failures | • Lens cleaning/replacement protocol • Automatic image-quality gating before inference • Continuous extrinsic calibration |
| Model drift | • Declining accuracy on new coating types • Unfamiliar lighting conditions • Asset variant changes • Domain shift over deployment lifecycle | • Low confidence scores during inference • Bounding box flickering in sequential frames • High false positive rates from environmental artifacts | • Shadow evaluation on periodic labeled samples • Monitoring confidence-score distributions over time • Staged model rollout with canary devices • Scheduled retraining on newly labeled field data • Rollback path to prior model version |
| Connectivity loss | • Extended offline periods beyond sync windows • Intermittent network availability • Bandwidth throttling | • Sync-queue depth monitoring • Last-successful-sync timestamp tracking • Growing local storage utilization | • Local storage capacity alerts • Peer-to-peer sync fallback for disaster contexts • Prioritized batch upload on reconnect • Intelligent edge-caching for zero data loss |
Offline-First Design and Synchronization Strategies
Offline Capability Requirements
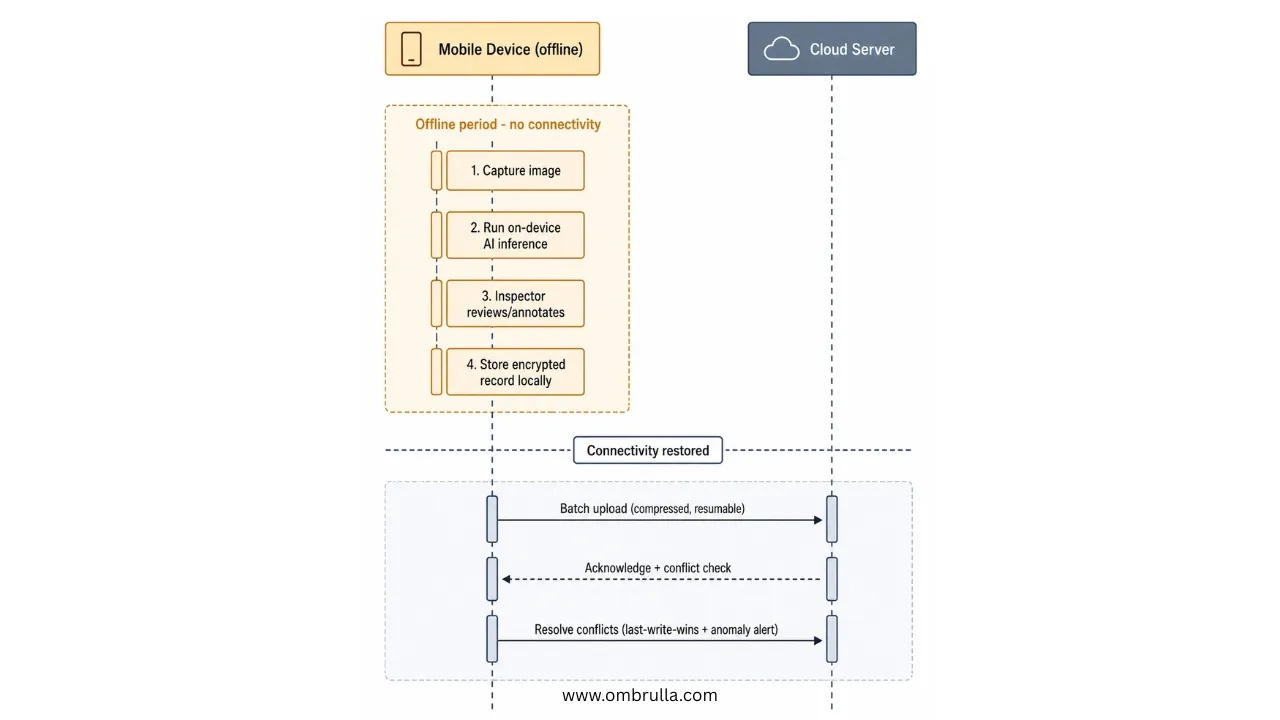
In mines, offshore rigs, and disaster areas, connectivity may be nonexistent, as is typical deep underground; intermittent, due to vessel movement or satellite-link interruption; or congested and prioritized for operational traffic ahead of inspection data. Enterprise-grade mobile inspection designs for remote operations accordingly emphasize offline-first behavior: every critical step in the inspection process, including AI inference itself, must function without a network connection. This translates into three concrete requirements: the application must be able to complete an inspection with full AI support and local validation; it must store forms, media, AI outputs, and logs locally with encryption; and it must provide the inspector with a clear status of unsynchronized items and remaining storage capacity.
Synchronization Models
When connectivity becomes available, the application synchronizes data using batched uploads with resumable transfers and compression; conflict-resolution rules, such as last-write-wins combined with anomaly alerts for critical fields where silent overwrite would be unacceptable; and, in some deployments, optional peer-to-peer sharing directly between devices for disaster zones lacking any central network infrastructure.
Edge AI Models and Performance Considerations
Model Choices for Mobile AI Inspection
Three model families recur across mobile AI inspection deployments: lightweight object detectors, such as MobileNet-SSD and YOLOv5n/YOLOv8n variants, for component and defect detection; segmentation models, such as mobile U-Net and DeepLab variants, for cracks, corrosion, and coating breakdown; and OCR models for reading analog gauges and indicator panels. In all three cases, models must be quantized, commonly to INT8 precision, pruned, or knowledge-distilled to fit within mobile compute and power budgets, a constraint that is especially binding on intrinsically safe hardware, which typically uses modest CPUs and lacks a discrete GPU.
Latency and User Experience
For field usability, AI inference latency should remain sub-second for simple tasks such as gauge reading, so that the result feels instantaneous to the inspector, and under a few seconds for more complex segmentation tasks. This latency budget guides model size, input resolution, and batching strategy. Experience from safety and inspection applications in adjacent domains shows that carefully tuned mobile models can deliver responsive user experience even under the demanding compute constraints of intrinsically safe devices.
| Task | Representative Model Families | Target Latency | Key Constraint on Rugged Hardware |
|---|---|---|---|
| Component/defect detection | MobileNet-SSD, YOLOv5n, YOLOv8n (quantized) | < 1 s per frame | No discrete GPU on most intrinsically safe devices; relies on CPU/NPU |
| Crack/corrosion/coating segmentation | Mobile U-Net, DeepLab variants (pruned/distilled) | 1-3 s per frame | Higher compute cost than detection; benefits most from quantization |
| Gauge/indicator OCR | Lightweight OCR models (e.g., compact CRNN variants) | < 1 s per reading | Sensitive to glare and lens fouling; needs robust pre-processing |
Evaluation Framework: Usability and Reliability in the Field
Technical Metrics
Evaluation of mobile AI inspection solutions should track AI performance metrics, including precision, recall, F1-score, and intersection-over-union (IoU) for defect segmentation, and OCR accuracy for gauge readings; latency and throughput metrics, including average and worst-case inference time and total time-to-complete an inspection; and reliability metrics, including crash rate, sync failure rate, battery consumption per shift, and device survival rate under field conditions.
Human-Centered Metrics
Equally important are human-centered metrics: task completion rate and error rate under real-world conditions; inspector satisfaction and perceived usefulness of the application; and the change in defect detection rate and report quality before versus after adopting mobile AI inspection. Field trials in offshore and marine contexts report that mobile inspection tools increase reporting volume and reduce time-to-report, with the addition of AI yielding further efficiency gains once model accuracy is sufficient for routine reliance.

Risk, Safety, and Governance
AI and Human Oversight
In safety-critical inspections, AI should augment rather than replace human judgment. Three governance recommendations follow from this principle: AI outputs should be treated strictly as recommendations, with inspectors remaining accountable for final decisions; the application should log both AI suggestions and human overrides for auditing and subsequent model improvement; and the system should adopt fail-safe defaults, such that when the model is uncertain or fails outright, the application falls back gracefully without blocking the inspector's work.
Data Protection and Ethics
In disaster zones or hazardous facilities, captured images may contain sensitive information, including faces, site layouts, or proprietary equipment. The application should therefore minimize captured personally identifiable information and other sensitive details where not strictly necessary for the inspection task; encrypt data both at rest on the device and in transit during synchronization; and comply with applicable local data-protection law, particularly where any facial or identity-related analytics are used.
Case Study Templates
This section presents three illustrative case-study templates that demonstrate how the architecture, usability, and reliability principles described in Sections 5 through 11 apply across the three environment classes introduced in Section 3. These templates are intended as design references rather than reports of completed field trials.
| Case Study | Target Environment | Core AI Capability | Primary Constraint Addressed |
|---|---|---|---|
| Underground mining | Tunnels, low light, dust, gas risk | Crack/spalling detection, gauge OCR, image classification for blockages | Zero connectivity until shaft station; intrinsic safety |
| Offshore corrosion survey | Platform deck, hull, marine vessel | Real-time corrosion segmentation and severity ranking | Glare, salt spray, vibration; intermittent satellite/Wi-Fi |
| Earthquake building triage | Damaged structures, disaster zone | Structural-damage segmentation, hazard-zone mapping | No connectivity, time pressure, rapidly changing conditions |
Case Study A: Mobile AI Inspection in Underground Mining
The objective of this case study is to use a mobile inspection application to perform AI-assisted inspection of ground conditions and equipment underground. In the corresponding process, models and checklists are pre-loaded at the surface; images of ground support and equipment are captured underground, with AI detecting cracks and missing bolts; the inspector validates results and records notes entirely offline; and data synchronizes once the inspector returns to a shaft station with backhaul connectivity. Expected benefits include improved detection of early deterioration, reduced manual data entry, and increased safety.
Case Study B: AI-Assisted Offshore Corrosion Surveys
The objective of this case study is to deploy a rugged inspection application on ATEX-certified tablets for corrosion mapping. In the corresponding process, inspectors walk the deck capturing panel images while the application segments corrosion in real time; the application estimates affected area and severity, ranking hotspots for follow-up; and data synchronizes via Wi-Fi or satellite link to the central integrity-management system. Principal challenges include glare, sea spray on camera lenses, and variable lighting, addressed through targeted model training and protective device housings.
Case Study C: Rapid Building Safety Assessment after Earthquakes
The objective of this case study is to provide a mobile AI application to building inspectors and emergency responders for rapid structural triage. In the corresponding process, inspectors photograph columns, beams, and walls, and the application uses AI to flag severe cracks and potential collapse risk; the application overlays color-coded severity on offline maps, with results synchronizing to a central coordination platform once connectivity permits. Expected benefits include faster coverage of affected areas, standardized triage criteria, and improved situational awareness for incident command.

Open Research Questions and Future Directions
Several research directions emerge from this survey of mobile AI inspection in hazardous environments.
- -Domain-general versus domain-specific models: balancing efficient, generalized models that transfer across asset types against highly tuned models specialized for each environment, such as coal versus potash mining.
- -Self-supervised and continual learning on-device: using unlabeled field data to improve models locally and centrally without overwhelming available bandwidth.
- -Explainability and human-AI collaboration: designing explanations that remain usable within constrained mobile interfaces and high-stress field conditions.
- -Standardized benchmarks: establishing public, anonymized datasets for mobile inspection tasks, such as crack detection in low light or corrosion on rough surfaces, evaluated under realistic noise and motion blur.
- -Energy-aware AI scheduling: dynamically adapting model complexity and sampling rate to battery and thermal budgets on rugged devices.
- -Integration with drones and robots: coupling mobile AI inspection with drone and robot data streams, using a shared application as a unified control and inspection interface.
Conclusion
Mobile devices, ruggedized hardware, and edge AI are transforming inspection in remote and hazardous environments. A well-designed mobile AI inspection solution, implemented as an offline-capable, rugged application, can turn the ubiquitous smartphone camera into a powerful inspection instrument, enabling inspectors, technicians, and responders to detect defects and hazards faster and more consistently than manual workflows alone.
To succeed in mines, offshore rigs, and disaster zones, such an application must combine an offline-first inspection process with robust synchronization mechanisms; efficient, reliable models that respect device constraints; human-centered interaction design tuned for personal protective equipment, stress, and environmental constraints; rugged devices certified for hazardous areas and capable of sustained field performance; and governance that keeps humans in control of final decisions and protects sensitive data.
For organizations and researchers, the recommended path forward is iterative: pilot mobile AI inspection in a contained use case, refine models and user experience based on field feedback, rigorously evaluate reliability and operational impact using the framework proposed in Section 10, and then scale across sites and hazard types. Pursued thoughtfully, mobile AI inspection can become a cornerstone of next-generation inspection strategy, complementing drones, robots, and fixed sensors, while keeping field personnel safer and better informed at the point of work.
References
- OnPlan. "Mobile Inspections and Work Instructions." Product overview, 2025.[onplan.com]
- Certainty Software. "Why Offline Inspection Capability Matters for Field Teams." 2025.[certainty.software]
- Ombrulla. "Mobile AI Inspection – AI-Powered Mobile Inspection App." Solution page, 2025.[ombrulla.com]
- Alpha Software. "Maintenance and Inspection Apps for Oil Industry: Offshore Oil Platforms." Case study, 2024.[alpha.com]
- DNV. "ShipManager QHSE – Mobile Inspection App." Solution overview, 2024.[dnv.com]
- MISTRAS Group. "PCMS Mobile – Mobile Inspection Reporting." Product documentation, 2024.[mistrasgroup.com]
- MarineInspection.app. "Marine Vessel – Digital Inspection and Maintenance Software." Product documentation, 2025.[marineinspection.app]
- SafetyCulture. "Oil and Gas Maintenance Software – Apps for Inspections and Maintenance." 2025.[safetyculture.com]
- Deloitte. "Improving Health and Safety in Mining with Automation, AI, and IoT." Industry article, 2024.[deloitte.com]
- Percepto. "Autonomous Mining Inspection and Monitoring." Solution overview, 2025.[percepto.co]
- i.safe MOBILE. "Digitising Hazardous Environments with i.safe Mobile." 2024.[i-safe.de]
- ecom instruments. "Explosion-Proof Tablets for Hazardous Areas (Android)." Product catalogue, 2025.[ecom-instruments.com]
- Getac. "Intrinsically Safe Tablets – Rugged Devices for Hazardous Locations." Solution page, 2024.[getac.com]
- SOTEN Technology Group. "Rugged Tablets for Mining Safety Inspections." 2024.[soten.tech]
- viAct.ai. "Next-Gen EHS: Computer Vision for Hazard Detection." 2024.[viact.ai]
- Capgemini. "Revolutionize Manufacturing with a Computer Vision Framework for Intelligent Inspection." Research brief, 2024.[capgemini.com]
- SafeEscape. "SafeEscape – AI-Powered Mobile Application for Disaster Alerts." Open-source project documentation, 2025.[github.com]
- Ladris. "Smarter Decisions for Disaster Response – AI-Native Platform." Product documentation, 2025.[ladris.com]